

Geometry
Points and Vectors
- Cartesian coordinate system - by far the most common
- games usually use Euclidean space
- in 2D engines, Y-axis is usually inverted

2D coordinate system

3D coordinate system
Points and Vectors
- Vector - a quantity that has both a magnitude and a direction
- vector can be used to represent a point, provided that we fix the tail of the vector to the origin of the coordinate system
Addition and subtraction
- vector + vector = vector
- vector - vector = vector
- point + vector = point
- point - point = vector
- point + point = undefined

Vector addition and subtraction
Points and Vectors
Magnitude
- scalar representing the length of the vector

Magnitude of a vector
Normalization
- a unit vector is a vector with a magnitude of one:
Normal vector
- vector is normal to a surface if it is perpendicular to it
Dot product
Cross product
- yields another vector that is perpendicular to two vectors
Projection
- projection of a vector onto another vector


Dynamics
Terms
- Kinematics - determines motion of objects without reference to forces
- Dynamics - determines how objects interact under the influence of forces
- Time - a continuous progress of events, measured in seconds
- Mass - a scalar quantity measured in kilograms
- Position - a point or an area occupied by an object
- Velocity - the rate of change of distance over time
- Acceleration - the rate of change of velocity over time
- Force - an action exerted upon a body in order to change its state

Dynamics
Linear Dynamics
- we ignore all rotational effects
- position can be described by a position vector
- velocity:
- acceleration:
- net force:
- Newton's second law:
- linear momentum:
Angular dynamics
- angular velocity:
- angular acceleration:
- torque: , caused by a force applied to a location


Motion
Projectile motion

Slope motion (no friction)

Equations of motion
- finding , given knowledge of
- vertical motion under the influence of gravity
- too difficult - with any change of any force, we would need to modify the simulation code
- analytical solutions are almost never possible in game physics
- Numerical integration

- given , the problem is to find
- we will start at and take steps in time along
the tangent, until we generate an approximation for - integration methods provide us with the possibility of
an approximation with increasing precision
Integration Methods
Implicit methods
- make use of quantities from the next time step
- decrease energy from the system
Explicit methods
- make use of known quantities at each time step
Semi-implicit methods
- combination of explicit and implicit methods
- very stable
Runge-Kutta family
- Euler methods, midpoint methods, RK4,...
Verlet family
- Regular Verlet
- Leapfrog Verlet
- Velocity Verlet

Euler Integration
Explicit method
Improved method
Implicit method
- cheap and easy to implement
- high error and poor stability, depending
directly on the time step






Steering Behaviors
Steering Behaviors
- a set of algorithms that help autonomous agents move in a realistic manner by using simple forces
- designed by Crag Reynolds in the early 90's
- Agent - a system situated within an environment, with the ability to sense that environment
- Motion layers
- action selection - choosing goals, strategy
- steering - trajectory calculation
- locomotion - way of moving, animation, articulation

Steering Behaviors
Seek
- the simplest steering behavior
- a force that directs an agent toward a target position

Steering Behaviors
Flee
- opposite of seek, creates a force that steers the agent away
Arrive
- seek + stopping movement, decelerates the agent onto the target

Pursuit
- agent intercepts a moving target
- predicts where the target is going to be in the future
- calls for a good prediction function
Evade
- opposite of pursuit
- the evader flees from the estimated future position

Steering Behaviors
Wander
- produces a force that will give an impression of a random walking
- small random displacement is applied to the velocity vector every frame
- a circle is projected in front of the vehicle
- the vehicle is steered toward a target that moves along the perimeter
- parameters: circle radius, distance from the vehicle and jittering (randomness)

Steering Behaviors
Path follow
- moves a vehicle along a set of waypoints
- the last waypoint can be reached using arrive, the others via seek
- smooth movement can be achieved using a tolerance radius or Bézier curve approximation
- very sensitive to configuration (max force, max velocity, radius,...)

Steering Behaviors
Flocking
- combination of three aspects:
- separation - steers a vehicle away from its neighborhood
- alignment - keeps the vehicle's direction aligned with its neighbors
- cohesion - moves a vehicle toward the center of mass of its neighbors


Physics Engine
Physics engine
- system that approximates physical phenomena in real-time
- can improve immersion
- can broke the game story
- Flow

Physics Engines
N-Collide
- 2D/3D collision detection library written in Rust
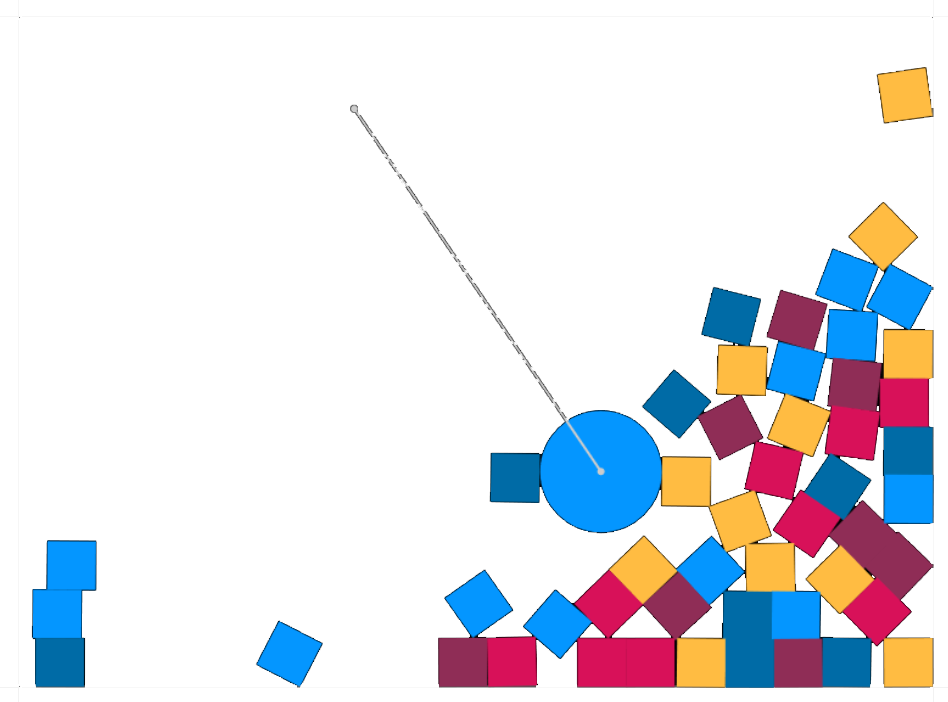
Box2D
- open-source C++ 2D physics engine
- supports CCD (continuous collision detection)
Bullet
- open-source 3D physics engine
- supports CCD
PhysX
- NVidia GPU engine
- PhysX destruction, PhysX clothing, PhysX particles
p2.js
- module JavaScript engine, supports CCD
Havok
- gold commercial standard
Physics and animation
- physics animation!
- animations must cooperate with physics engine to run seamlessly
- cut-scenes and state-transition animations are detached from physics
- physics-based interactions - animations generated by physics engine
- almost all AAA games still use static animations connected to the physical environment

Physics engine features
- collision detection
- contact callbacks
- joints
- concave and convex hulls
- compound bodies
- sleeping objects
- raycasting, shapecasting
- deformable structures
- destructible structures
- trigger volumes
- complex machines
- drivable vehicles
- rag doll characters
- water surface, hair, cloth
- particles

Physics in games
Pinballs (1980+)
- non-trivial OBB collision detection
The Incredible Machine (1993)
- advanced physical interactions
Worms (1995)
- pixel-level environment interaction
Half-Life 2 (2004)
- destructible environment, liquid physics


Physics in games
Angry Birds (2009)
- physics as the core mechanic
INSIDE (2016)
- soft-bodies driven by a network of impulses
Half-Life Alyx (2020)
- physics-based interactions
Noita (2020)
- pixel-level physics simulation


Object types
Body
- fundamental object in the physics scene
Rigid Body
- idealized, infinitely hard, non-deformable solid object
- physics-driven bodies - driven entirely by the simulation
- game-driven bodies - moved in a non-physical way (animations)
- fixed bodies - collision-only bodies (e.g. triggers)
Soft body
- deformable
Shape
- region of space described by a boundary, with a definite inside and outside (curved line, polygon, curved surface, polyhedron)
Fixture
- used to describe size, shape and material properties
Object Types
Constraint
- connects bodies together in order to simulate interaction (ropes, wheels, vehicles, chains)
Sensor/Phantom
- entity that provides a feedback when certain objects overlap
- participates on collision detection but doesn't affect the scene
Rag doll
- displays human-like figures with a realistic motion
Destructible object
- breakable object, can be implemented by using rigid body dynamics, dividing the model into a number of breakable pieces
Constraints
- Revolute - a hinge or pin, where the bodies rotate
- wheels, chains, rotating doors, catapults, levers
- Distance - a point on each body will be kept at a fixed distance apart
- Rope - restricts the maximum distance between two points
- Prismatic - body's motion is restricted to a single degree of freedom
- elevators, sliding doors, pistons
- Weld - holds the bodies at the same orientation
- Cone-Twist - adds a cone and twist axis limits (6 degrees of freedom)
- Gear - controls two other joints so that the movement of one affects the other
- Motor - joint with torque or angular impulses

Constraints

rope

revolute

prismatic

cone-twist
Constraints


Fracturing
- breaking an object into smaller fragments
- in many cases destruction is not dynamic (can be made using animations)
- techniques: manual fracturing, Voronoi Shattering, voxels


Paratrooper (1982)

Fictorium (2017)

Teardown (2020)
Particle Systems
- a collection of point masses that obeys certain physical laws
- can model complex fuzzy shapes and dynamics
- uses Flyweight pattern (array of positions, velocities, group lists)
- particles are not only moving points! Even a tree may become a particle
Applications
- fluids
- visual effects
- flocks
- rendered trails (plants)
- soft bodies (flag, cloth)
Soft bodies and liquids
- usually implemented as a combination of particle systems and visual effects
- common model:
- apply collision detection upon particles
- apply pressure and repulsive forces
- update positions
- handle interaction with other objects
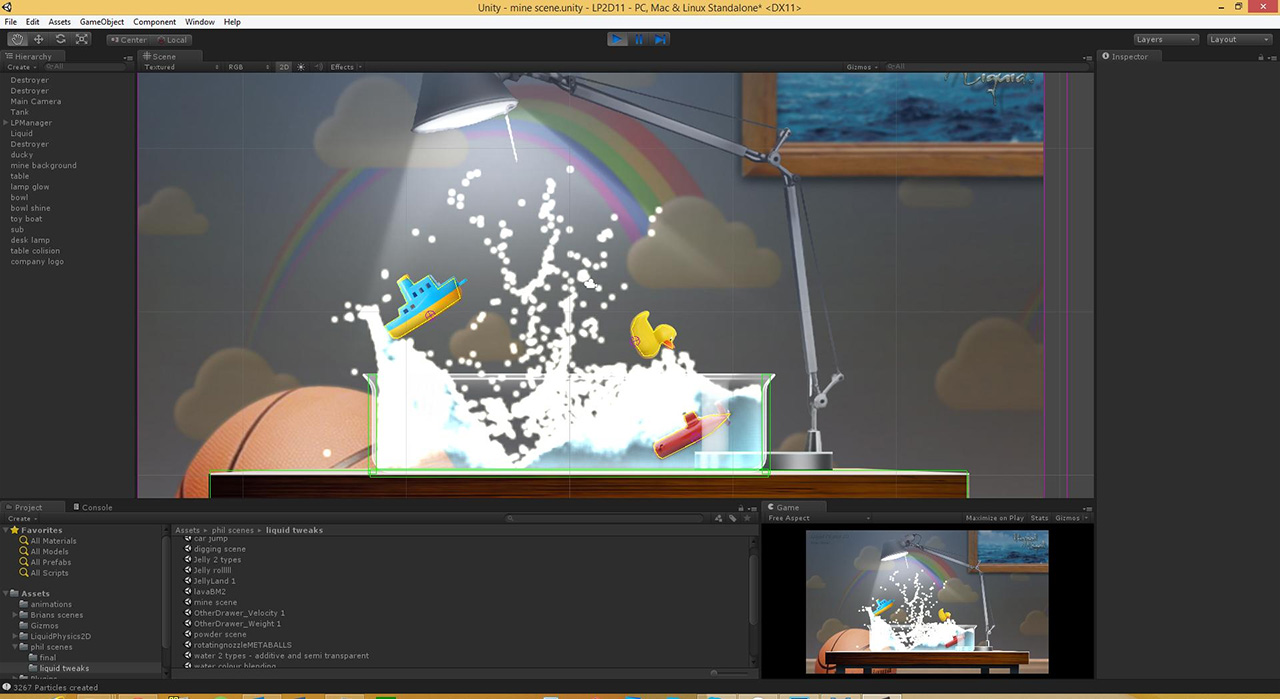
Example: CryEngine Fluid Physics
- utterly complex
- 5000+ lines of code for just the RigidBody part
- very poor code quality
1 if (min(min(min(body.M,ibody_inv.x),ibody_inv.y),ibody_inv.z)<0) { 2 body.M = body.Minv = 0; 3 body.Ibody_inv.zero(); body.Ibody.zero(); 4 } else { 5 body.P = (body.v=v)*body.M; 6 body.L = body.q*(body.Ibody*(!body.q*(body.w=w))); 7 }

Collision Detection
Collision Detection
Steps
- positions for the next frame are determined
- a spatial data structure finds collision candidates
- collision candidates are filtered out into a set of real collision pairs
- collisions are resolved by the collision resolver, by applying impulses or penalty forces
- constraints are satisfied by the constraint resolver
Collidable entities
- we need to provide a collision representation for each object
- simple shapes are preferred (a car might be modelled as a rectangle)
- more-complex shapes should only be used when the simple ones provide inadequate information to achieve the desired behavior
- if collidable entities don't overlap, no more testing is required
- if they do overlap, more refined testing is required
Bounding Boxes
Sphere
- center point and radius (4 numbers for 3D)
Capsule
- 2D: rectangle and two circles
- 3D: cylinder and two hemispherical end-caps
- representation: two points and radius

AABB
- axis-aligned bounding box
- rectangular volume (cuboid) whose faces are parallel to the axes of the coordinate system
- very efficient test for penetration
- AABB must be recalculated whenever the object rotates
Bounding Boxes
OBB
- oriented bounding box
- defined by a position and orientation
- commonly used

k-DOP
- discrete oriented polytope
- more general case of AABB and OBB
- approximates the shape of an object

Compound shapes
- more efficient alternative to a poly-soup
- the system first tests bounding volumes of compound shapes

Convex hull
- smallest convex volume containing the object

Comparison


Collisions in 2D games
- even side-scrollers need compound objects
- simple AABB collision will not work for irregular sprites

Looking for collision candidates
Naive solution
- each pair
- -> 10 objects result in 100 checks, 100 in 10 000 etc.
Quad-tree
- efficiency is , since the index takes about comparisons to traverse
- good for point-like small objects
- worst case:
Sweep and Prune
- sorts the starts (lower bounds) and ends (upper bound) of bounding volumes of each solid along a number of axes
BSP
- binary space partitioning, good for complex static geometries (buildings)
Grid, Oct-tree, R-tree, R+tree, R*tree, X-tree, M-tree,...
Resolving collision candidates
Sphere-Sphere
- , where is a central point
Sphere-ray
- we just test the distance between a single sphere center and a ray
AABB-AABB
- test the borders
AABB-Ray
- intervals and mustn't overlap

OBB-OBB
- axis-separating theorem by Gottschalk
SAT
SAT (separating axis theorem)
- if an axis can be found along which the projection of two
convex shapes do not overlap, then the two shapes do not intersect
- for 2D: AABB 2 axes, OBB 4 axes
- for 3D: AABB 3 axes, OBB 15 axes
- AABB in 2D: only 2 axis to test

Tunneling problem
Stepped world
- time steps vary based on occurring situation
- collision time is calculated by doing binary search in time, moving object back and forth by 1/2 steps (5 iterations is usually enough)

Continuous Collision Detection (CCD)
- uses Raycasting or more advanced Swept Shapes technique
- Raycasting - the object emits a ray which is tested for intersection
- Swept Shapes - a new shape is formed by the motion of the original one

Collision response
How to respond to a collision?
Explosion
- adding energy to a system of rigid bodies
Fracturing
- breaking objects apart
Restitution
- amount of bounce an object has when it hits something
- when two bodies collide, they compress slightly and then rebound, losing energy
Friction
- force that arises between two bodies that are in continuous contact, resisting their movement
- removes energy from a system of rigid bodies
- static, dynamic, rolling
Constraint
- taking constraints into consideration (e.g door can only rotate around the hinge)
Collision Resolver
Relaxation
- LCP - Linear Complementarity Problem
- if one object moves, it will push another, and another, and another
- very complex numeric algorithms
- resolvers: PGS, Dantzig solver, Lemke method, Jacobi method
Coming to rest
- all objects lose energy, leading to eventual rest
- not simple (floating-point error, inaccuracies, numerical instability)
- sleep criteria
- momentum or energy are below a threshold
- simulation islands
- grouping objects that either are interacting or have a potential to interact
- sleep criteria
Lecture Summary

- I know basic vector operations: addition, subtraction, magnitude, normalization, and dot product
- I know basic types of steering behaviors
- I know object types for physics engines
- I know what particle systems are
- I know basic constraints, such as rope, revolute, prismatic, and cone-twist
- I know basic collision bounding boxes
- I know SAT theorem
- I know what CCD is
Goodbye Quote
Do you guys not have phones?